>>>Główna
W projekcie zdecydowaliśmy się na wirtualny model windy stworzony za pomocą Matlab-Simulink 4.1. Ta wersja programu wymusiła pewne ograniczenie w tworzeniu modelu jak np: brak funkcji „guide” pozwalającej na tworzenie aktywnych przycisków, jak również utrudnione korzystanie z wykresów.
Model windy:

· Polaryzacja – blok umożliwiający polaryzacje, ustawnie go na zero powoduję przełączenie bloku switch, a w efekcie zmianie polaryzacji.
· Napięcie zasilania – ustawienie go na zero powoduję przełączenie bloku Switch1, i Switch2, a w efekcie odcięcie napięcia zasilania , oraz odłączenie obciążenia (odpowiada to działaniu sprzęgła w windzie rzeczywistej).
· Zerowe napięcie – po przełączeniu Switch1 ustawia napięcie zasilania na zero.
· Obciążenie – blok ten odpowiada za obciążenie windy
· x.pietro, parter, x.pie- bloki te symulują działanie czujników połażenia, odpowiednia liczba obrotów powoduje przesłanie na wyjście jedynki logicznej, co odpowiada dojechaniu windy na odpowiednie
piętro.
· Licznik obrotów – blok liczący całkę z prędkości obrotowej silnika, czyli ilość obrotów silnika
· Scope.x - wykresy pomocnicze pokazujące liczbę obrotów, stan czujników położenia
· State-space – blok symulujący działanie silnika prądu stałego. Macierze stanu są następujące:
Dane powyżej macierze opisują silnik o następujących danych:
UN=440V
IN=56.2A
n=150obr/min

MuxinPlug:

Blok
MuxinPlug umożliwia przesłanie sygnału do programu stworzonemu w Simulink-u, z
odpowiedniego wejścia karty pomiarowej. Przełączenie
bloków switch następuje po wysłaniu sygnału ze sterownika, przez blok DS1102IN (poprzednio
przez zmianę wartości bloku constant). Dzięki temu program umieszczony w
sterowniku PLC mógł decydować, kiedy winda ma się zatrzymać, i w którą stronę
jechać.
Model od strony wyjścia:
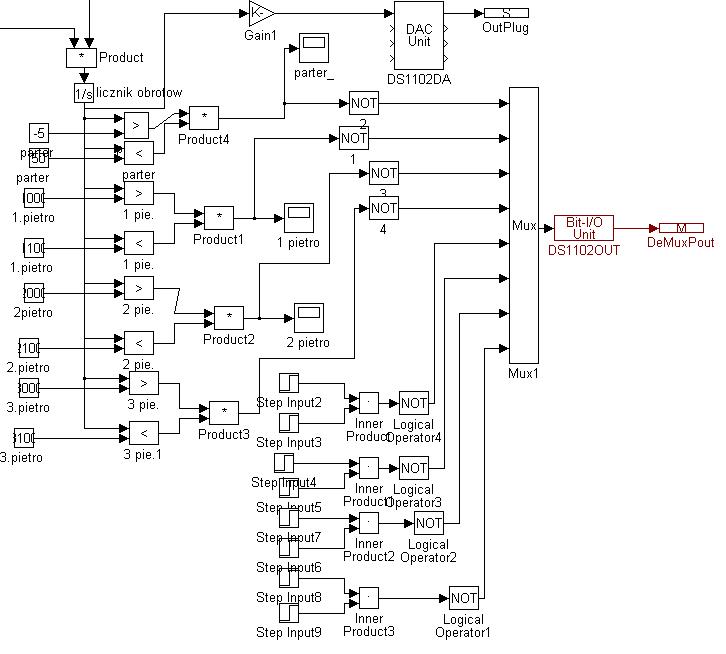
Sygnały pochodzące z odpowiednich czujników pomiarowych przekazywanie są, przez blok DS1102OUT do odpowiedniego wejścia sterownika (blok DeMuxPout umożliwia przypisanie odpowiedniego sygnału, odpowiedniemu wyjściu). Dzięki temu sterownik pobiera na bieżąco informacje, o aktualnym położeniu windy. Cztery dolne wejścia symulują sygnały pochodzące od wezwań windy.
W projekcie zdecydowaliśmy się na wirtualny model windy stworzony za pomocą Matlab-Simulink 4.1. Ta wersja programu wymusiła pewne ograniczenie w tworzeniu modelu jak np: brak funkcji „guide” pozwalającej na tworzenie aktywnych przycisków, jak również utrudnione korzystanie z wykresów.
Model windy:
· Polaryzacja – blok umożliwiający polaryzacje, ustawnie go na zero powoduję przełączenie bloku switch, a w efekcie zmianie polaryzacji.
· Napięcie zasilania – ustawienie go na zero powoduję przełączenie bloku Switch1, i Switch2, a w efekcie odcięcie napięcia zasilania , oraz odłączenie obciążenia (odpowiada to działaniu sprzęgła w windzie rzeczywistej).
· Zerowe napięcie – po przełączeniu Switch1 ustawia napięcie zasilania na zero.
· Obciążenie – blok ten odpowiada za obciążenie windy
· x.pietro, parter, x.pie- bloki te symulują działanie czujników połażenia, odpowiednia liczba obrotów powoduje przesłanie na wyjście jedynki logicznej, co odpowiada dojechaniu windy na odpowiednie
piętro.
· Licznik obrotów – blok liczący całkę z prędkości obrotowej silnika, czyli ilość obrotów silnika
· Scope.x - wykresy pomocnicze pokazujące liczbę obrotów, stan czujników położenia
· State-space – blok symulujący działanie silnika prądu stałego. Macierze stanu są następujące:

Dane powyżej macierze opisują silnik o następujących danych:
UN=440V
IN=56.2A
n=150obr/min
Model
należało zmodyfikować tak, aby możliwe było przesłanie programu do karty
pomiarowej, która umożliwiała komunikację modelu ze sterownikiem PLC.
Zmodyfikowany model od strony wejść silnika:
Zmodyfikowany model od strony wejść silnika:
MuxinPlug:
Model od strony wyjścia:
Sygnały pochodzące z odpowiednich czujników pomiarowych przekazywanie są, przez blok DS1102OUT do odpowiedniego wejścia sterownika (blok DeMuxPout umożliwia przypisanie odpowiedniego sygnału, odpowiedniemu wyjściu). Dzięki temu sterownik pobiera na bieżąco informacje, o aktualnym położeniu windy. Cztery dolne wejścia symulują sygnały pochodzące od wezwań windy.